RoboCup 2023: Autonomous Robot Manipulation Challenge
Posted on August 25, 2025 by Yash Kumar Sahu
Table of Contents

RoboCup and ARM Challenge
RoboCup is the biggest robotic and AI competition in the world (as of 2023). It's 2023 edition took place from July 4 to 10 at the Parc des Expositions in Bordeaux, France. The event brought together thousands of visitors and researchers in robotics and artificial intelligence around a common ambition: to share knowledge, highlight the latest innovations and advance technical and scientific progress. The event covered all the major scientific and technological challenges including the Autonomous Robot Manipulation (ARM) Challenge.

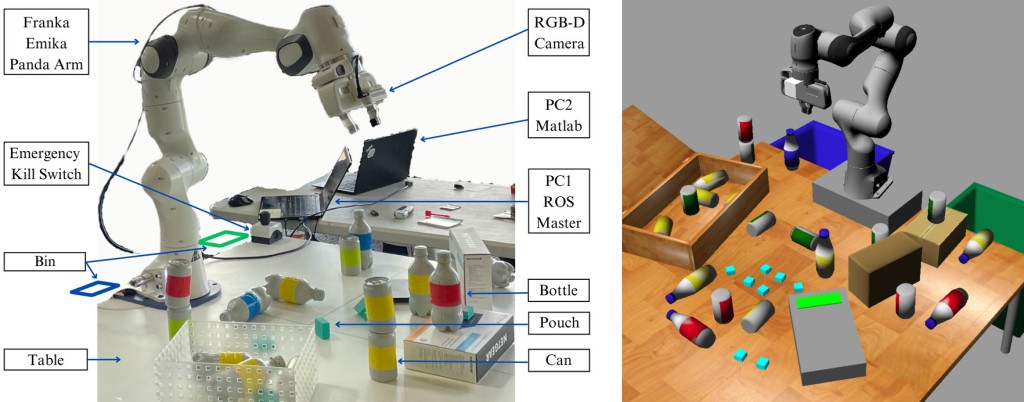
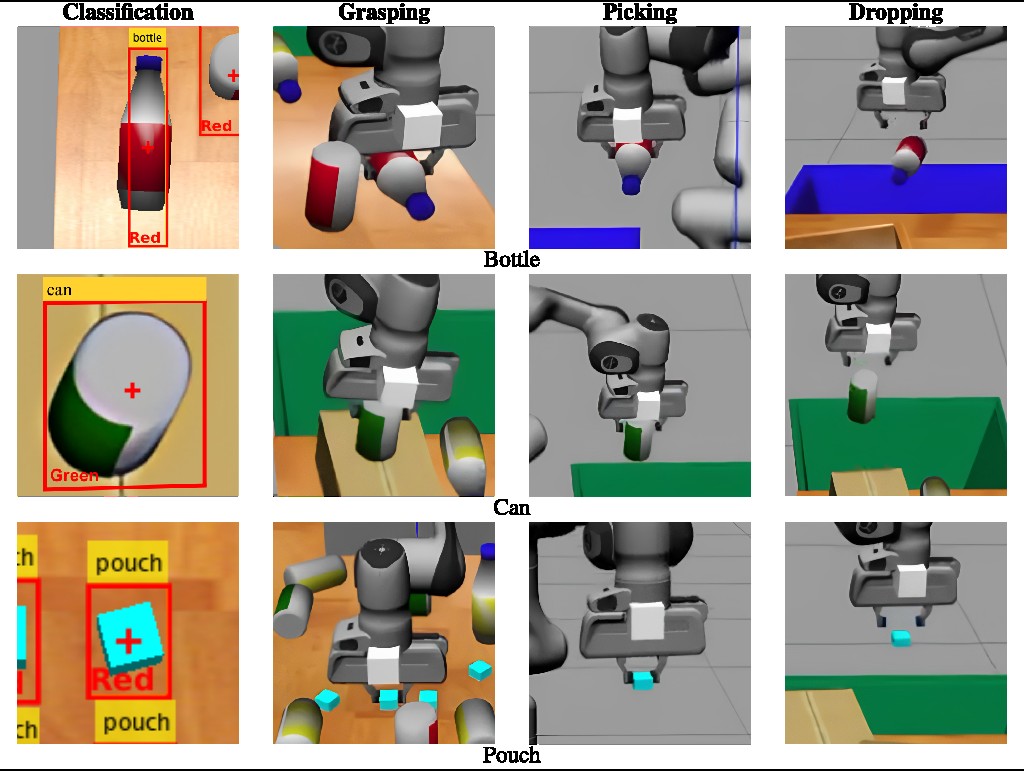
The RoboCup ARM Challenge aims at involving young researchers and students to address challenging problems related to autonomous robot manipulation, within an educational scientific competition. Participants are tasked with completing a recycling task with a robot manipulator in a dynamic simulation environment. Teams had to implement perception and control algorithms in MATLAB and Simulink to grasp and manipulate bottles, cans, and detergent pouches within a table to classify them into two bins. Points are awarded based on the performance of the algorithm in new environments. The top 6 shortlisted teams were invited to participate in the RoboCup 2023 Finals (France) using an in-person setup with a Franka Emika robot.
Our Team
The interdisciplinary student team SillyARM—comprising Chayan Maiti, Deep Patel, Radhika Mittal, and Yash Kumar Sahu—carried out research and development activities at the Centre for AI, IoT and Robotics (CAIRO), IIITDM to participate in the RoboCup ARM 2023 Challenge under the supervision of Prof. M. Sreekumar.
Approach
Objects are detected using YOLO with Non-Maximum Suppression to remove weak detections. Their 3D orientation is estimated via PCA on the depth point cloud, then transformed to the robot’s base frame to determine the grasp pose. Polynomial fitting smooths the robot’s trajectory for efficient motion.

Results
Ranked 4th globally and 3rd in classification accuracy among 10+ countries in the finals held in France.
