European Rover Challenge (ERC) 2022
Posted on August 25, 2025 by Yash Kumar Sahu
Table of Contents

ERC Challenge
The European Rover Challenge (ERC) is a renowned international planetary robotics competition organized by the European Space Foundation, that provides a valuable opportunity for students looking to advance their careers in industries vital to future generations. Students from technical universities around the world form teams and design unique robots. After few months of hard work their concepts are validated by space sector professionals. When qualified to the finals, teams further test their prototypes on a geologically realistic Martian terrain in numerous demanding tasks based on real NASA and ESA missions.
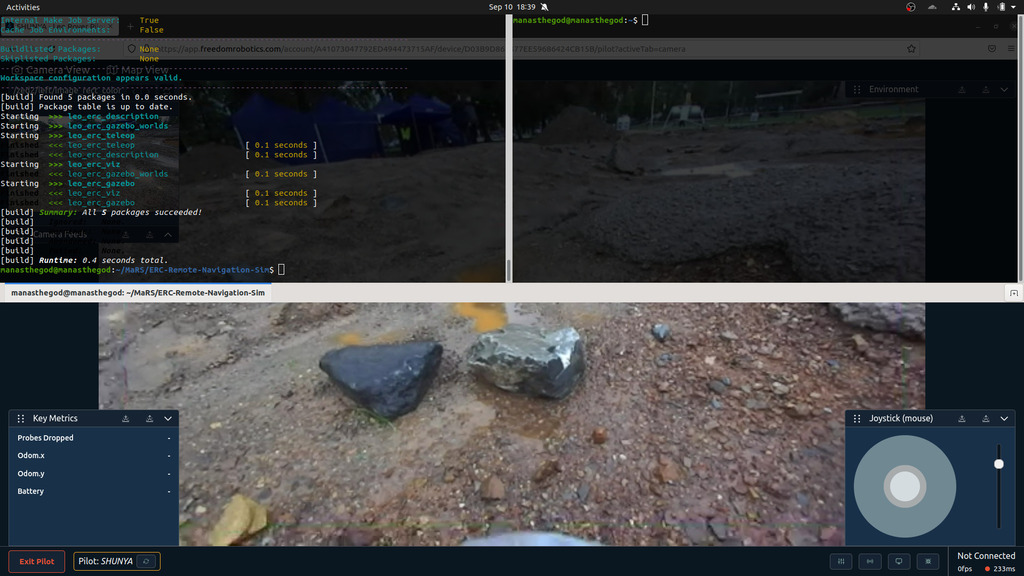
Teams develop perception and control algorithms for the rover to perform tasks such as marker identification, localization, path planning, autonomous navigation, and object detection in the Mars arena—a synthetic environment designed to mimic Martian conditions with craters, real rocks, and mud. The rover is operated remotely in real time (we controlled it from India while it was deployed in Poland). The algorithms are first developed and validated in a Mars simulation environment and then tested in real-world conditions.
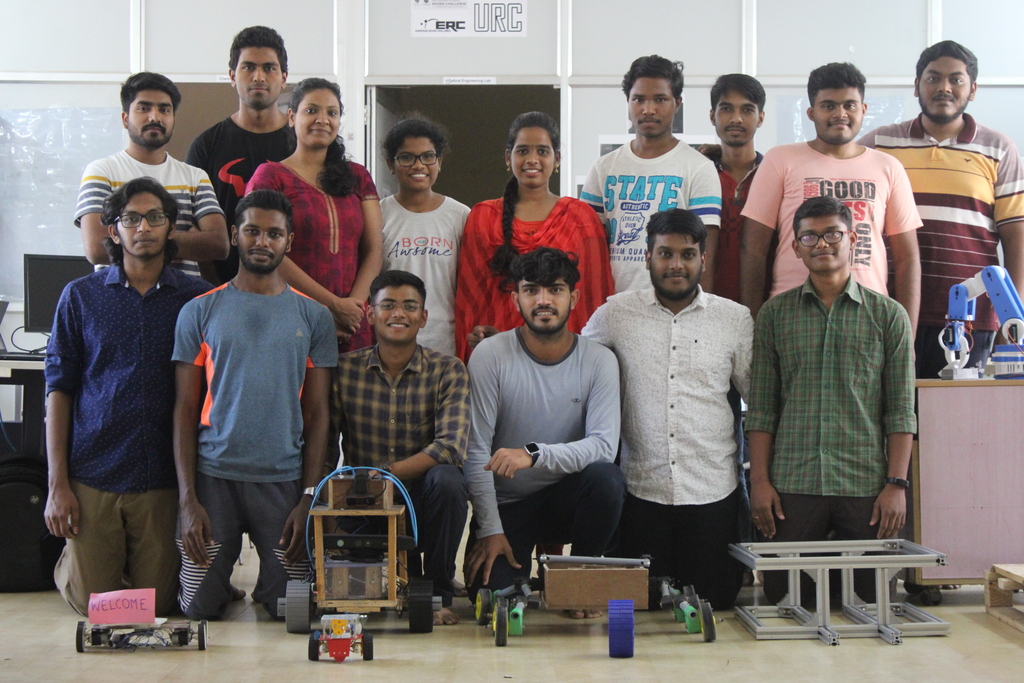
Our Team
Team Shunya: Yash Kumar Sahu (Software Team Lead), Jagadeeshan, Chandan, Atharv, Radhika, Pranav, Deep, Chayan, Radhika, Bhavna, Yash, Vishal, Rajesh, Devi, Ram, Vishnu, Murali, Himanshu, Tushar, Sibi, Manas, Vishnuram. Prof. Shubhankar Chakraborty (Mentor).
Results
Ranked 6th globally at the remote edition world finals featuring 50+ teams from 10+ countries. 2nd Rank Globally at the Qualifications-A Round.

Gallery